
Research
Wearable Device Deployment and Preclinical Testing
This work is with the NSF Nanosystems Engineering Research Centers for Advanced Self-powered Systems of Integrated Sensors and Technologies (ASSIST) at NC State University. The research involves the development of multimodal sensors-based wearable engineered systems —wrist- and chest-worn devices incorporating electrocardiogram (ECG), photoplethysmogram (PPG – an optical measurement technic for blood volume variations and heart rate), motion, and environmental sensors— for correlated sensing of physiological and environmental parameters to manage exposure-related respiratory conditions like asthma. Tasks include sensor characterization and optimization, designing the device packaging for effective ambient environmental sensing, improving wearability, investigating failure modes, and the preclinical testing and deployment for subsequent transitions to higher technology readiness levels. Device data would be used to identify changes in the user’s physiologic conditions and predict asthma exacerbations through advanced data analytics. The user would make actionable decisions based on customized device notifications. The eventual goal of such wearable systems would be to improve quality of life as well as impact the economy in the healthcare industry.

Insect-computer Interaction and Biobotic Performance Optimization
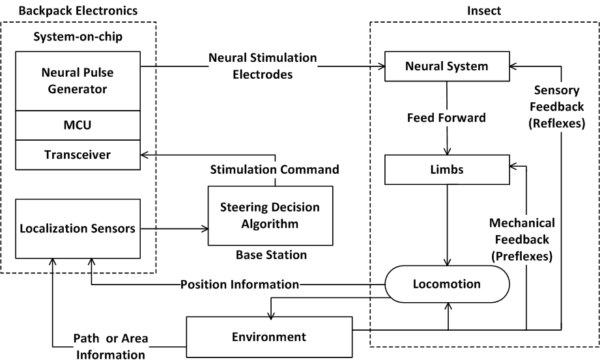
This project, at the intersection of wearables (for insects!) and robotics, explored the possibility of using a swarm of instrumented Madagascar hissing cockroaches (Gromphadorhina portentosa) as biobots (biological robots) for investigating deep underneath building rubble, mapping the area, locating survivors, and sharing collected information with first responders. Insect biobots (biological robots) are developed by equipping them with system-on-chip-based electronic backpacks and implanting electrodes into their antennae (and cerci). Cockroaches navigate by sensing their environment using their antennae through a form of thigmotaxis. The research hypothesis is to control the direction and speed of locomotion by stimulating their antennae and cerci using PWM neurostimulation pulses to achieve successful locomotory control. In this way, a single biobot or multiple biobots (individually) can be controlled to follow lines, navigate a maze, or be autonomously guided to a sound source location —a technic that can be potentially used to respond to help calls from survivors in an under-rubble area. Biobotic performance evaluation and investigation of failure modes of the neural implants are an integral part of this project. Real-time assessment and electrical modeling, via the interface impedance spectroscopy, can aid the monitoring and predicting of electrochemical changes of the biotic-abiotic interfaces at the sites of the implanted electrodes. This can help ensure conditions for safe, reliable, and optimized biobotic operation.
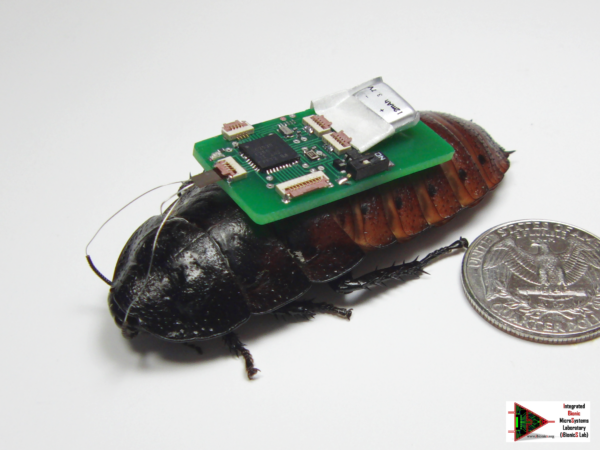
Insect Biobot (Instrumented Madagascar Hissing Cockroach)
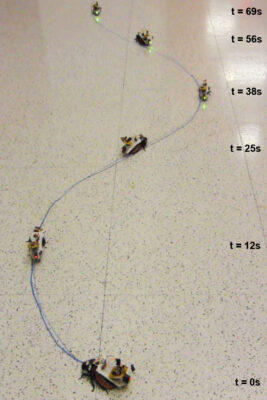
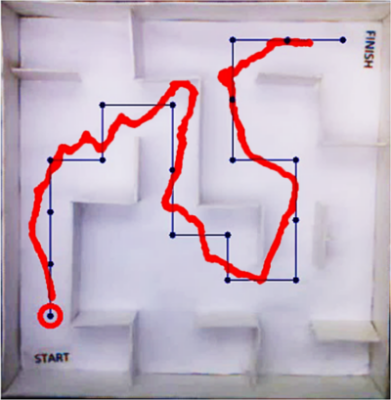
Biobotic Line Following Biobotic Maze Navigation
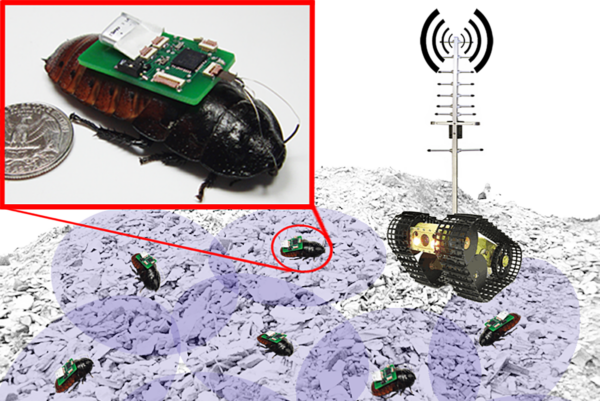
Illustration of a Biobotic Sensor Network